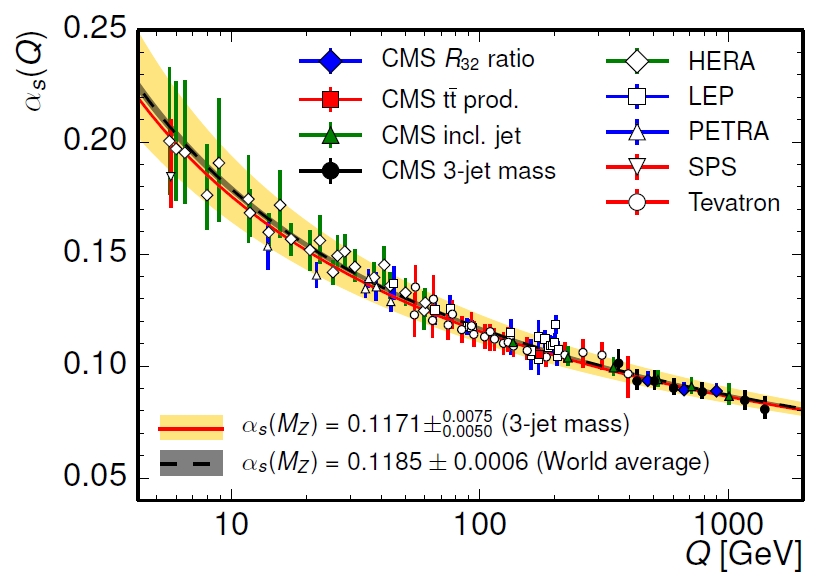
In this post I discussed why the gauge couplings depend on the energy scale. Here I discuss how we can compute this change with energy in practice. This is another post from the category “I wished this kind of post had existed when I started”. In addition to the general formulas, I discuss two examples in detail. Moreover, I list numerical values for the group invariants that apear in the general formulas at the end of this post.
The RGEs for a gauge coupling constant depend on the particles that can appear in the loops as virtual pairs and therefore contribute to the screening of the charge. Luckily there are general formulas that we can use to derive the $\beta$-functions for a given particle content. Defining $\omega_i := \alpha_i^{-1} := \frac{4\pi}{g_i^2}$ and denoting the coupling strength corresponding to the gauge group $i$ by $g_i$, we have up to $2$-loop order
\begin{equation}
\mu \frac{d\omega_i(\mu)}{d \mu}=-\frac{a_i}{2 \pi} – \sum_j \frac{b_{ij}}{8\pi^2\omega_j(\mu)} \,.
\end{equation}
This can be written in a more compact form using $ \frac{d\ln(\mu)}{d \mu} = \frac{1}{\mu} \rightarrow d\ln(\mu) = \frac{d\mu}{\mu} $
\begin{equation} \label{eq:gaugerges}
\frac{d\omega_i(\mu)}{d \ln(\mu)}=-\frac{a_i}{2 \pi} – \sum_j \frac{b_{ij}}{8\pi^2\omega_j(\mu)} \, .
\end{equation}
The numbers $a_i$ are called 1-loop beta coefficients and $b_{ij}$ the 2-loop beta coefficients For a $G_1 \times G_2$ gauge group they are given by
\begin{equation} \label{eq:1LoopRGE}
a_i = \frac{2}{3}T(R_1)d(R_2)+ \frac{1}{3} T(S_1)d(S_2) -\frac{11}{3}C_2(G_1) \,.
\end{equation}
The generalization to $G_1 \otimes G_2 \otimes \ldots$ will be explained using an explicit example in the next section.
The $2-$loop beta coefficients for $i=j$ are given by
\begin{equation} \label{eq:2LoopRGEii}
b_{ij} = \Big(\frac{10}{3} C_2(G_1)+2C_2(R_1) \Big) T(R_1)d(R_2)+ \Big(\frac{2}{3} C_2(G_1)+4C_2(S_1) \Big) T(S_1) d(S_2)- \frac{34}{3} (C_2(G_1))^2
\end{equation}
and for $i \neq j$
\begin{equation} \label{eq:2LoopRGEij}
b_{ij} = 2C_2(R_2)d(R_2)T(R_1)+4C_2(S_2)d(S_2)T(S_1)\, .
\end{equation}
As noted above our gauge group is $G_1 \otimes G_2$. The fermions representation is denoted by $(R_1,R_2)$ and the scalar representation by $(S_1,S_2)$. The other symbols that appear in the equations are:
- $T(R_i)$, which denotes the Dynkin index of the representation $R_i$
- $T(S_i)$, which denotes the Dynkin index of the representation $S_i$
- $C_2(R_i)$, which denotes the quadratic Casimir operator of the representation $R_i$
- $C_2(S_i)$, which denotes the quadratic Casimir operator of the representation $S_i$
- $C_2(G_i)$, which denotes the quadratic Casimir operator of the group $G_i$ which is defined as the quadratic Casimir operator of the adjoint representation of $G_i$
- $d(R_i)$ the dimension of the representation $R_i$
- $d(S_i)$ the dimension of the representation $S_i$.
If the fermions (or scalars) live in a reducible representation, e.g. $(R_1^1,R_2^1) \oplus (R_1^2,R_2^2)$, the contributions from both irreducible representations get added and in general we sum over all irreducible representations. For the $a_i$ formula this means we have $\frac{2}{3}T(R_1^1)d(R_2^1) +\frac{2}{3}T(R_1^2)d(R_2^2)$. Further one must keep in mind that in most realistic models we are dealing with $3$ generations of fermions and therefore the fermionic part in the equations gets multiplied by three. In other words, three generations means we have $(R_1^1,R_2^1) \oplus (R_1^2,R_2^2)\oplus (R_1^3,R_2^3)$, but the three irreducible representations are identical with respect to the gauge group and therefore we can simply multiply by three. For the $a_i$ this means explicitly $\frac{2}{3}T(R_1^1)d(R_2^1)\cdot 3$ for each fermion representation. The relevant group invariants are listed at the end of this post. We will discuss two explicit examples in a moment, but there is one importang thing we must take into account.
Normalization of the Hypercharge
There is one subtlety when one of the groups in the product $G_1 \otimes G_2$ is $U(1)$. For example, this is the case for the standard model gauge group $SU(3) \times SU(2) \times U(1)$. In the standard model the normalization of the $U(1)$ charges (the hypercharges) are not fixed. We can always rescale $ Y \equiv a Y’$ and absorb the extra factor $a$ into the coupling constant $g_Y \equiv \frac{g_Y’}{a}$. Any normalization choice is equally good. This is a strange situation, because the RGEs depend on the hypercharges. This means, the running of the standard model $U(1)$ depends on the normalization that we choose for the hypercharges. This means, for example, we could always rescale our hypercharge such that the three coupling constants meet at a point: $g_{2L}$ and $g_{3C}$ must meet somewhere if their running is not completely equal. Then we can rescale our hypercharges, which changes the starting point of $g_Y$, such that $g_Y$ intersects this point, too. However, if the standard model gauge group is interpreted as a remnant of a broken unification group, there is only one correct normalization and no ambiguity.
When we embed $G_{SM}$ in a larger gauge group $G_{GUT}$, we no longer have the freedom to rescale. In such scenarios the $U(1)_Y$ generator must correspond to a generator of the enlarged gauge symmetry and therefore its normalization must be the same as for the other generators. The normalization of the generators of a non-abelian group is fixed through the Dynkin index of the fundamental representation $T(f)= c$, where the most common convention is $c=\frac{1}{2}$. (A notable exception is Slansky, who uses the convention $c=1$.) The Dynkin index of a representation is defined in the last section of this post.
For example if $G_{SM}$ is embedded in $SU(5)$, one usually identifies the components of the conjugate $5$-dimensional representation as the anti-right-handed down quark and the left-handed lepton doublet. Therefore under $SU(3) \times SU(2) \times U(1)$, we have the decomposition
\begin{align}
\bar{5} = (1, \bar 2)_{-\frac{1}{2}a} \oplus (\bar{3},1)_{\frac{1}{3}a} = \begin{pmatrix} \nu_L \\ e_L \end{pmatrix} \oplus \begin{pmatrix} (d_R^c)_{\text{r}} \\ (d_R^c)_{\text{b}} \\ (d_R^c)_{\text{g}} \end{pmatrix} = \begin{pmatrix} \nu_L \\ e_L \\ (d_R^c)_{\text{r}} \\ (d_R^c)_{\text{b}} \\ (d_R^c)_{\text{g}} \end{pmatrix}
\end{align}
The relative factors $-\frac{1}{2}$ and $\frac{1}{3}$ for the $U(1)$ charge are fixed, because here Cartan generators are diagonal $5\times 5$ matrices with trace zero\footnote{Recall that $SU(5)$ is the set of $5 \times 5$ matrices $U$ with determinant $1$ that fulfil $U^\dagger U = 1$. For the generators $T_a$ this means $\text{det}(e^{i \alpha_a T_a})=e^{i \alpha_a Tr(T_a)} \stackrel{!}{=}1$. Therefore $Tr(T_a) \stackrel{!}{=} 0$}. Therefore we have
\begin{align}
&Tr(Y)= Tr \begin{pmatrix} Y(\nu_L) & 0 & 0 & 0 &0 \\ 0 & Y(e_L) & 0 & 0 &0 \\ 0 & 0 & Y((d_R^c)_{\text{r}}) & 0 &0\\ 0 & 0 & 0 & Y((d_R^c)_{\text{b}})&0\\ 0 & 0 & 0 & 0 &Y((d_R^c)_{\text{g}}) \end{pmatrix} \stackrel{!}{=} 0 \notag \\
&\rightarrow 2 Y(L) + 3Y(d_R^c) \stackrel{!}{=} 0
\end{align}
This means the hypercharge generator in $SU(5)$ models reads\footnote{$\nu_L$ and $e_L$ must have the same hypercharge $Y(L)$, because they live in a $SU(2)$ doublet after the breaking of the $SU(5)$ symmetry.}
\begin{equation}
Y=
\begin{pmatrix} -\frac{1}{2}a & 0 & 0 & 0 &0 \\ 0 & -\frac{1}{2}a & 0 & 0 &0 \\ 0 & 0 & \frac{1}{3}a & 0 &0\\ 0 & 0 & 0 & \frac{1}{3}a&0\\ 0 & 0 & 0 & 0 &\frac{1}{3}a \end{pmatrix} \, .
\end{equation}
Demanding that the Dynkin index of this generator in the fundamental representation is $\frac{1}{2}$ yields
\begin{align}
T(\bar{5}) &= Tr(Y^2) \stackrel{!}{=} \frac{1}{2} \notag \\
& \rightarrow \frac{5}{6} a^2 = \frac{1}{2} \notag \\
& \rightarrow a = \sqrt{\frac{3}{5}} \, .
\end{align}
Completely analogous we compute that the hypercharge normalization in $SO(10)$ models is $a = \sqrt{\frac{3}{5}}$, too.
To summarize: The correct normalization is given by
\begin{equation}Y’ = \sqrt{\frac{3}{5}} Y ,\end{equation}
where $Y$ is the usual hypercharge and $Y’$ the correctly normalized hypercharge that must be used when we evaluate the RGEs.
Take note that if there is more than $U(1)$ subgroup at some intermediate scale, there are further subtleties one must take into account. For example, the definitions of the $U(1)$ subgroups can not be chosen arbitrarily and a wrong choice yields a wrong unification scale. This is illustrated nicely in this paper. Therefore one must be careful which definition is used for the RGE running. A recent discussion how this is done correctly can be found here.
Explicit Example: $SU(4) \times SU(2) \times SU(2) \times D$ $1-$Loop Beta Coefficients
Consider a theory with gauge group $SU(4) \times SU(2)_R \times SU(2)_L \times D$, where $D$ denotes $D$-parity, which is a discrete symmetry that exchanges $L \leftrightarrow R$. We have three generations of fermions in $(4,1,2)\oplus(\bar{4},2,1)$ plus scalars in $(1,2,2)\oplus (10,3,1) \oplus (\overline{10},1,3) $. Here $G_1$ is the group whose coupling constant we are considering. Using Eq. \ref{eq:1LoopRGE} we have (here, $SU(4)$ is $G_1$, $SU(2)_R$ is $G_2$ and $SU(2)_L$ is $G_3$. Therefore $R_1$, $S_1$ denote the corresponding $SU(4)$ representations)
\begin{align}
a_{SU(4)} &= \frac{2}{3} (
\underbrace{\frac{1}{2}}_{T(R_1=4)} \underbrace{1}_{d(R_2=1)}\underbrace{2}_{d(R_3=2)}
+\underbrace{\frac{1}{2}}_{T(\bar{4})}\underbrace{2}_{d(R_2=2)}
\underbrace{1}_{d(R_3=1)}
)\cdot \overbrace{3}^{3 \text{ generations}} \notag \\
&\quad+ \frac{1}{3} (
\underbrace{3}_{T(S_1=10)} \cdot \underbrace{1}_{d(S_2=1)} \underbrace{3}_{d(S_3=3)}
+\underbrace{0}_{T(S_1=1)} \cdot \underbrace{2}_{d(S_2=2)} \underbrace{2}_{d(S_3=2)}
+\underbrace{3}_{T(S_1=10)} \cdot \underbrace{3}_{d(S_2=3)} \underbrace{1}_{d(S_3=1)} ) \notag \\
&\quad-\frac{11}{3} \underbrace{4}_{C_2(SU(4))} \notag \\ &
= -\frac{14}{3} \, ,
\end{align}
and (here, $SU(2)_R$ is $G_1$, $SU(4)$ is $G_2$ and $SU(2)_L$ is $G_3$. Therefore $R_1$, $S_1$ denote the corresponding $SU(2)_R$ representations)
\begin{align}
a_{SU(2)_R} &= \frac{2}{3} (
\underbrace{0}_{T(R_1=1)} \underbrace{4}_{d(R_2=4)}\underbrace{2}_{d(R_3=2)}
+\underbrace{\frac{1}{2}}_{T(R_1=2)}\underbrace{4}_{d(R_2=4)}
\underbrace{1}_{d(R_3=1)}
)\cdot \overbrace{3}^{3 \text{ generations}} \notag \\
&\quad+
\frac{1}{3} (
\underbrace{2}_{T(S_1=3)} \cdot \underbrace{10}_{d(S_2=10)} \underbrace{1}_{d(S_3=1)} +\underbrace{\frac{1}{2}}_{T(S_1=2)} \cdot \underbrace{1}_{d(S_2=1)} \underbrace{2}_{d(S_3=2)}
+\underbrace{0}_{T(S_1=1)} \cdot \underbrace{10}_{d(S_2=10)} \underbrace{3}_{d(S_3=3)}) \notag\\
&\quad-\frac{11}{3} \underbrace{2}_{C_2(SU(2)_R)} \notag \\ &
= \frac{11}{3} \, ,
\end{align}
and (here, $SU(2)_L$ is $G_1$, $SU(4)$ is $G_2$ and $SU(2)_R$ is $G_3$. Therefore $R_1$, $S_1$ denote the corresponding $SU(2)_L$ representations)
\begin{align}
a_{SU(2)_L} &= \frac{2}{3} (
\underbrace{\frac{1}{2}}_{T(R_1=2)} \underbrace{4}_{d(R_2=4)}\underbrace{1}_{d(R_3=1)}
+\underbrace{0}_{T(R_1=1)}\underbrace{4}_{d(R_2=4)}
\underbrace{2}_{d(R_3=2)}
)\cdot \overbrace{3}^{3 \text{ generations}} \notag \\
&\quad+
\frac{1}{3} (
\underbrace{0}_{T(S_1=1)} \cdot \underbrace{10}_{d(S_2=10)} \underbrace{3}_{d(S_3=3)}
+\underbrace{\frac{1}{2}}_{T(S_1=2)} \cdot \underbrace{1}_{d(S_2=1)} \underbrace{2}_{d(S_3=2)}
\underbrace{3}_{T(S_1=10)}
+ \underbrace{2}_{T(S_1=3)} \cdot \underbrace{10}_{d(S_2=10)} \underbrace{1}_{d(S_3=1)}
) \notag \\
&\quad-\frac{11}{3} \underbrace{2}_{C_2(SU(2)_L)} \notag \\
&= \frac{11}{3} \, ,
\end{align}
in accordance with the results in this paper.
Explicit Example: $SU(4) \times SU(2)_R \times SU(2)_L \times D$ $2-$Loop Beta Coefficients
Using Eq. \ref{eq:2LoopRGEii}, we have for the $2$-loop beta coefficients
\begin{align}
b_{SU(4)SU(4)} &=
\Big(\frac{10}{3} \underbrace{4}_{C_2(G_1=SU(4))}
+2\underbrace{\frac{3}{2}}_{C_2(R_1=4)}
\Big) \underbrace{\frac{1}{2}}_{T(R_1=4)}\underbrace{1}_{d(R_2)=1} \underbrace{2}_{d(R_3)=2} \cdot \underbrace{3}_{3 \text{ generations}} \notag \\
&\quad +\Big(\frac{10}{3} \underbrace{4}_{C_2(G_1=SU(4))}
+2\underbrace{\frac{3}{2}}_{C_2(R_1= \bar{4})}
\Big) \underbrace{\frac{1}{2}}_{T(R_1=4)}\underbrace{2}_{d(R_2)=2} \underbrace{1}_{d(R_3)=1} \cdot \underbrace{3}_{3 \text{ generations}} \notag \\
& \quad + \Big(\frac{2}{3} \underbrace{4}_{C_2(G_1=SU(4))}
+4\underbrace{\frac{9}{2}}_{C_2(S_1=10)} \Big) \underbrace{3}_{T(S_1=10)} \underbrace{3}_{d(S_2=3)} \underbrace{1}_{d(S_3=1)} \notag \\
& \quad + \Big(\frac{2}{3} \underbrace{4}_{C_2(G_1=SU(4))}
+4\underbrace{\frac{9}{2}}_{C_2(S_1=10)} \Big) \underbrace{3}_{T(S_1=10)} \underbrace{1}_{d(S_2=1)} \underbrace{3}_{d(S_3=3)} \notag \\
& \quad + \Big(\frac{2}{3} \underbrace{4}_{C_2(G_1=SU(4))}
+4\underbrace{0}_{C_2(S_1=1)} \Big) \underbrace{0}_{T(S_1=1)} \underbrace{2}_{d(S_2=2)} \underbrace{2}_{d(S_3=2)} \notag \\
& \quad – \frac{34}{3} (\underbrace{4}_{C_2(G_1=SU(4))})^2 \notag \\
&= \frac{1749}{6} \, ,
\end{align}
\begin{align}
b_{SU(2_L)SU(2_L)} = b_{SU(2_R)SU(2_R)} &=
\Big(\frac{10}{3} \underbrace{2}_{C_2(G_1=SU(2))}
+2\underbrace{\frac{3}{4}}_{C_2(R_1=2)}
\Big) \underbrace{\frac{1}{2}}_{T(R_1=2)}\underbrace{4}_{d(R_2)=4} \underbrace{1}_{d(R_3)=1} \cdot \underbrace{3}_{3 \text{ generations}} \notag \\
&\quad +\Big(\frac{10}{3} \underbrace{2}_{C_2(G_1=SU(2))}
+2\underbrace{0}_{C_2(R_1= 1)}
\Big) \underbrace{0}_{T(R_1=1)}\underbrace{4}_{d(R_2)=\bar{4}} \underbrace{2}_{d(R_3)=2} \cdot \underbrace{3}_{3 \text{ generations}} \notag \\
& \quad + \Big(\frac{2}{3} \underbrace{2}_{C_2(G_1=SU(2))}
+4\underbrace{2}_{C_2(S_1=3)} \Big) \underbrace{2}_{T(S_1=3)} \underbrace{10}_{d(S_2=10)} \underbrace{1}_{d(S_3=1)} \notag \\
& \quad + \Big(\frac{2}{3} \underbrace{2}_{C_2(G_1=SU(2))}
+4\underbrace{0}_{C_2(S_1=1)} \Big) \underbrace{0}_{T(S_1=1)} \underbrace{10}_{d(S_2=10)} \underbrace{3}_{d(S_3=3)} \notag \\
& \quad + \Big(\frac{2}{3} \underbrace{2}_{C_2(G_1=SU(2))}
+4\underbrace{\frac{3}{4}}_{C_2(S_1=2)} \Big) \underbrace{\frac{1}{2}}_{T(S_1=2)} \underbrace{1}_{d(S_2=1)} \underbrace{2}_{d(S_3=2)} \notag \\
& \quad – \frac{34}{3} (\underbrace{2}_{C_2(G_1=SU(2))})^2 \notag \\
&= \frac{584}{3}
\end{align}
and for $i \neq j$ using Eq. \ref{eq:2LoopRGEij}
\begin{align}
b_{SU(4)SU(2)_L} = b_{SU(4)SU(2)_R} &=
2 \underbrace{\frac{3}{4}}_{C_2(R_2=2)}\underbrace{2}_{d(R_2=2)}\underbrace{\frac{1}{2}}_{T(R_1=4)} \cdot \underbrace{3}_{3 \text{ generations}} \notag \\
&\quad + 2 \underbrace{0}_{C_2(R_2=1)}\underbrace{1}_{d(R_2=1)}\underbrace{\frac{1}{2}}_{T(R_1=\bar{4})} \cdot \underbrace{3}_{3 \text{ generations}} \notag \\
& \quad +4\underbrace{0}_{C_2(S_2=1)}\underbrace{1}_{d(S_2=1)}\underbrace{3}_{T(S_1=10)} \notag \\
& \quad +4\underbrace{2}_{C_2(S_2=3)}\underbrace{3}_{d(S_2=3)}\underbrace{3}_{T(S_1=10)} \notag \\
& \quad +4\underbrace{\frac{3}{4}}_{C_2(S_2=2)}\underbrace{2}_{d(S_2=2)}\underbrace{0}_{T(S_1=1)} \notag \\
&= \frac{153}{2} \, ,
\end{align}
\begin{align}
b_{SU(2)_LSU(4)} = b_{SU(2)_RSU(4)} &=
2 \underbrace{\frac{15}{8}}_{C_2(R_2=4)}\underbrace{4}_{d(R_2=4)}\underbrace{\frac{1}{2}}_{T(R_1=2)} \cdot \underbrace{3}_{3 \text{ generations}} \notag \\
&\quad + 2 \underbrace{\frac{15}{8}}_{C_2(R_2=\bar{4})}\underbrace{4}_{d(R_2=\bar{4})}\underbrace{0}_{T(R_1=1)} \cdot \underbrace{3}_{3 \text{ generations}} \notag \\
& \quad +4\underbrace{\frac{9}{2}}_{C_2(S_2=10)}\underbrace{10}_{d(S_2=10)}\underbrace{2}_{T(S_1=3)} \notag \\
& \quad +4\underbrace{\frac{9}{2}}_{C_2(S_2=10)}\underbrace{10}_{d(S_2=10)}\underbrace{0}_{T(S_1=1)} \notag \\
& \quad +4\underbrace{0}_{C_2(S_2=1)}\underbrace{1}_{d(S_2=1)}\underbrace{\frac{1}{2}}_{T(S_1=2)} \notag \\
&= \frac{756}{2} \, ,
\end{align}
\begin{align}
b_{SU(2)_L SU(2)_R} = b_{SU(2)_RSU(2)_L} &=
2 \underbrace{\frac{1}{2}}_{C_2(R_2=2)}\underbrace{2}_{d(R_2=2)}\underbrace{0}_{T(R_1=1)} \cdot \underbrace{3}_{3 \text{ \ generations}} \notag \\
&\quad + 2 \underbrace{0}_{C_2(R_2=1)}\underbrace{1}_{d(R_2=1)}\underbrace{\frac{1}{2}}_{T(R_1=2)} \cdot \underbrace{3}_{3 \text{ generations}} \notag \\
& \quad +4\underbrace{0}_{C_2(S_2=1)}\underbrace{1}_{d(S_2=1)}\underbrace{2}_{T(S_1=3)} \notag \\
& \quad +4\underbrace{2}_{C_2(S_2=3)}\underbrace{3}_{d(S_2=3)}\underbrace{0}_{T(S_1=1)} \notag \\
& \quad +4\underbrace{\frac{3}{4}}_{C_2(S_2=2)}\underbrace{2}_{d(S_2=2)}\underbrace{\frac{1}{2}}_{T(S_1=2)} \notag \\
&= 3
\end{align}
in accordance with the results in this paper.
Appendix: Group Invariants
One possibility to label representations is given by operators constructed from the generators known as Casimir operators. These are defined as those operators that commute with all generators. There is always a quadratic Casimir operator
\begin{equation}
C_2(r) = T^A T^A \, ,
\end{equation}
where $T^A$ denotes the $d(r) \times d(r)$ matrices that represent the generators in the representation $r$. Another important label is the Dynkin index, which is defined as
\begin{equation}
T(r) \delta^{AB} = \text{Tr}(T^AT^B) \, .
\end{equation}
The standard convention is that the fundamental representation has Dynkin index $\frac{1}{2}$. (Huge lists of Dynkin indices can be found in Slansky’s famous paper. However the indices listed there must be divided by $2$ because the Slansky uses the non-standard convention that the fundamental representation has Dynkin index $1$. )
The Dynkin Index of a representation and the corresponding quadratic Casimir operator are related through
\begin{equation} \label{eq:DynkinCasimirRelation}
\frac{T(r)}{d(r)}= \frac{C_2(r)}{D},
\end{equation}
where $D$ denotes the dimension of the adjoint representation, i.e. of the Lie algebra. For the adjoint representation we therefore have $T(\text{adjoint})=C_2(\text{adjoint})$.
The following tables list the quadratic Casimir operators and Dynkin indices for the most important representations.
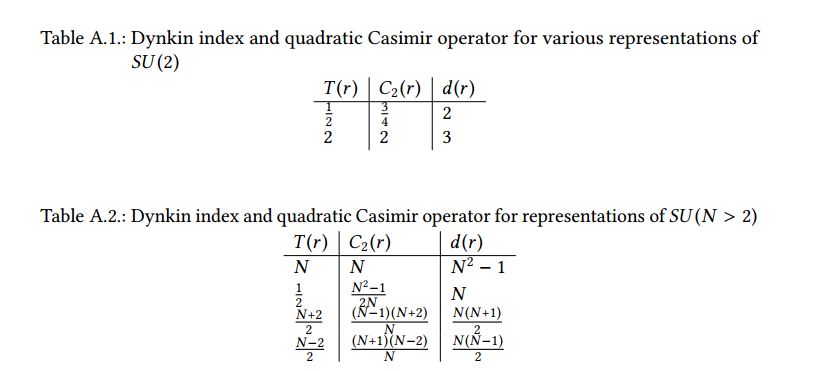
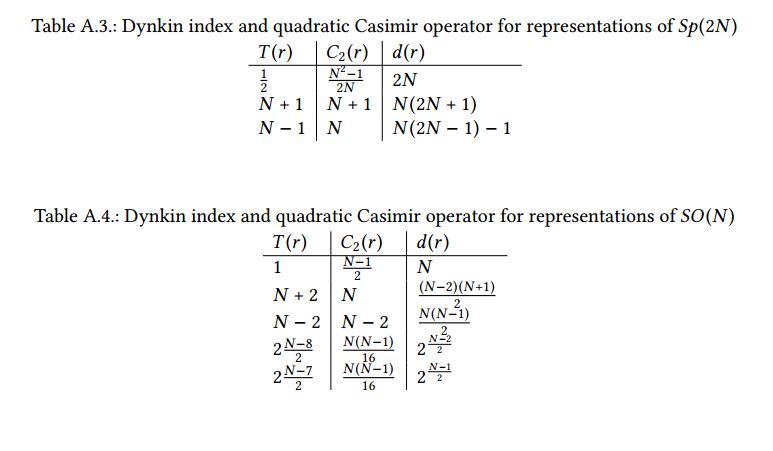
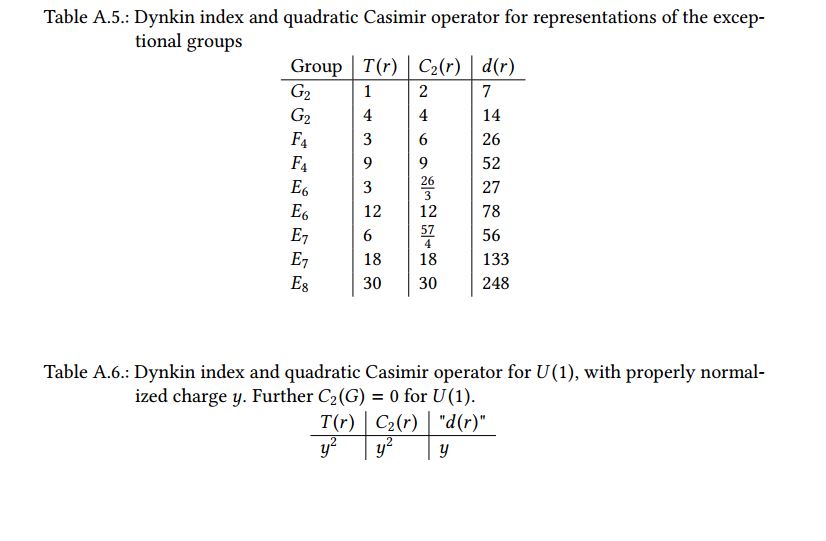
{kind=link}